Mobile manipulators enable a wide range of operations with mobility and advanced manipulation capabilities. Despite
their potential, existing approaches typically treat the mobile base and the manipulator separately, thereby limiting
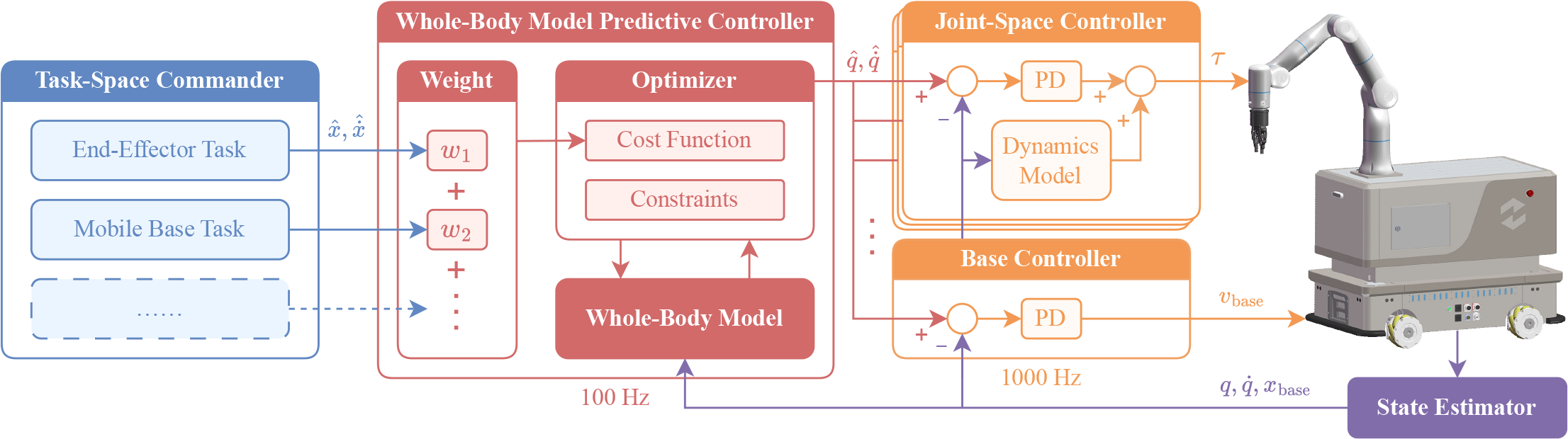
the optimality of the system for composite whole-body behaviors. In this work, we present a Whole-Body Model Predictive
Control framework for mobile manipulation involving tasks with varying timelines. We integrate task priorities across
both task and time dimensions, bringing inherent transition ability with enhanced performance. Our approach improves the
trajectory tracking performance by up to 36% in terms of manipulability and reduces the maximum velocity during task
priority transitions by 53% compared to the existing approach while maintaining a low computational cost of 4.3ms,
allowing for high reactivity in real-world applications. We demonstrate its effectiveness through a door-opening and
traversing behavior, showcasing the first successful implementation of a non-holonomic mobile manipulator in such a
scenario.